
KEMOMIMI
ABOUT 博士課程時に製作したもの.動物の形態部位のコミュニケーション能力に着目し,インターフェース化を検討. 担当箇所 メディア露出 WEB記事 ITmedia NEWS“けもみみ”の動きと感情の関係、電通大が調査 3Dモデルの球体に耳を生やして検証
記事を開く →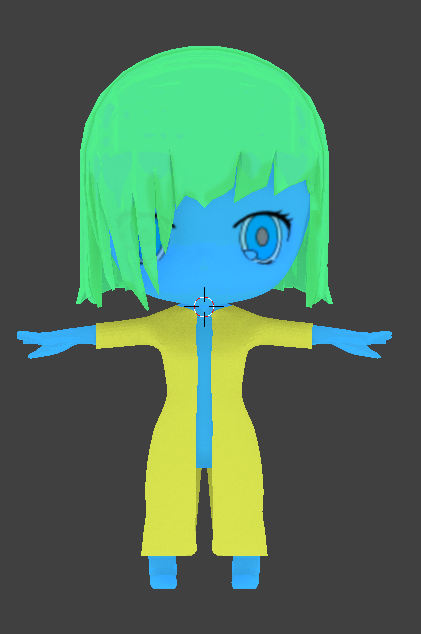
SLIME GIRL
ABOUT バ美肉ことバーチャル美少女受肉をしてみたいなという動機で作成.個人的にスライムは最強だと思っている.初めてのモデリングだったが正味30時間くらいでできた. 担当箇所 デザイン スライム娘を基調に モデリング blenderを利用 その他 VRChatにアップロードもしてしばらくスライムボディを楽しみました.透過設定は次に探っていく.
記事を開く →
Licker-Tongue
ABOUT 修士一年のときにIVRC出場に際して製作したもの.「舐める」行為に着目し、コミュニケーションインターフェースへの可能性を検討中.人生初の特許を出願マイナーチェンジを繰り返しサムネの姿へ 担当箇所 コンセプトデザイン 内部機構設計 Autodesk Inventorを利用 加工 3Dプリンターを利用 モーションデザイン 前後揺動 左右揺動 上下屈曲 対称屈曲 その他 その年のIVRCに参加.予選時に4位及びVR観客賞.決勝では明和電機社長賞 学会参加 SIGGRAPH Asia 2019 Emerging Technologies メディア露出 テレビ 2017年3月24日 「タモリ倶楽部」 テレビ朝日 2017年5月14日 「理系いたずらグランプリ!!」 テレビ朝日 2017年9月10日 「モヤモヤさまぁ~ず2」 テレビ東京 2018年7月23日 「月曜から夜ふかし」 日本テレビ 2022年1月28日 「大阪ほんわかテレビ 業務用食材A-プライス絶品グルメ&最先端ペットロボ!」 読売テレビ 2022年4月29日 「世界!オモシロ学者のスゴ動画祭3」 NHK WEB記事 WirelessWire News「IVRC(国際学生対抗バーチャルリアリティコンテスト)が連れてくる未来」 オモテク探偵団! ~オープンイノベーションの未来を発掘~「研究室でペロペロされたい!―電気通信大学 野嶋研究室に行ってみた」 ITmedia NEWS唾液のぬるぬるも再現する“舌ロボット”「Licker」 電通大が開発
記事を開く →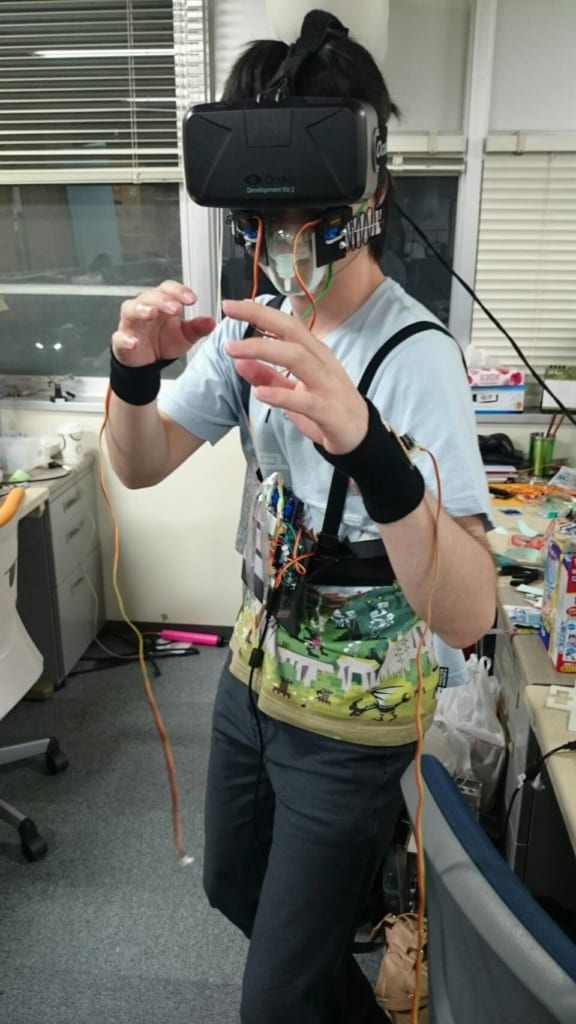
GILL+MAN
ABOUT 修士一年のときに製作したもの.人が「エラ呼吸」を行うとしたらどんな感覚になるのかを追い求めてみた.担当は頬の部分.エラならばパクパクしてるよねということでその感触を再現. 担当箇所 コンセプトデザイン エラ機構設計 加工 その他 その年のIVRCで書類審査を通過して予選に参加.以降は,研究室同期のプロジェクトとして進行中.
記事を開く →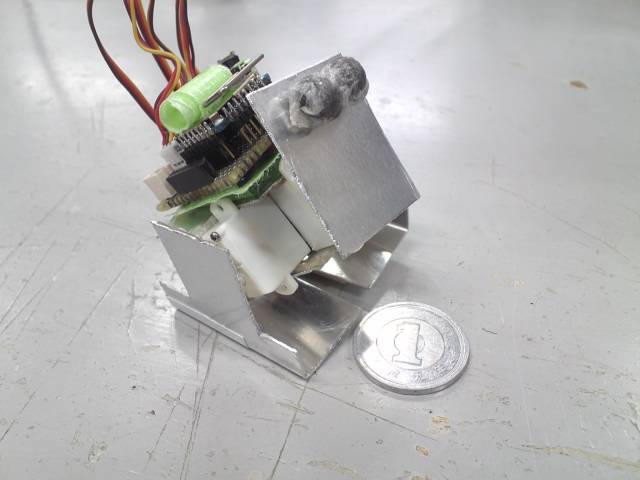
MINIMUM BOOM BOOM
ABOUT International Micro Robot Maze Contestに向けて製作した機体.1×1×1 inchに収まるサイズ.このサイズで二足歩行できるのが自慢.しかも無線 SPEC 自由度は,体重移動,右足,左足の3軸 計3軸.twi-lite利用で無線でサーボをコントロール.Boom Boomの中身と比べると… 担当箇所 コンセプトデザイン Boom Boomを小型化! 設計 紙に手書き 加工 薄いアルミをハサミでチョキチョキ 組立 それぞれ両面テープで固定 モーションデザイン 前進,後退 左右旋回 その他 International Micro Robot Maze Contest 2014ではカデコリー 3aで準優勝 リンク 当時のブログ
記事を開く →
QB / QB 2
ABOUT 2014年のInternational Micro Robot Maze Contestに向けて製作した機体.10×10×10 mmに収まるサイズ.QB2になる際はタイヤとして使っていたシリコンチューブが2重巻きに. 担当箇所 コンセプトデザイン モーターパワーに負けない重さ→ 真鍮でボディを作ろう! 設計 Autodesk Inventorを利用 加工 真鍮をフライス加工 組立 モーター組付け モーションデザイン 前進後退 左右旋回 その他 International Micro Robot Maze Contest 2014ではカデコリー0で準優勝International Micro Robot Maze Contest 2015ではカデコリー0 & 1で優勝
記事を開く →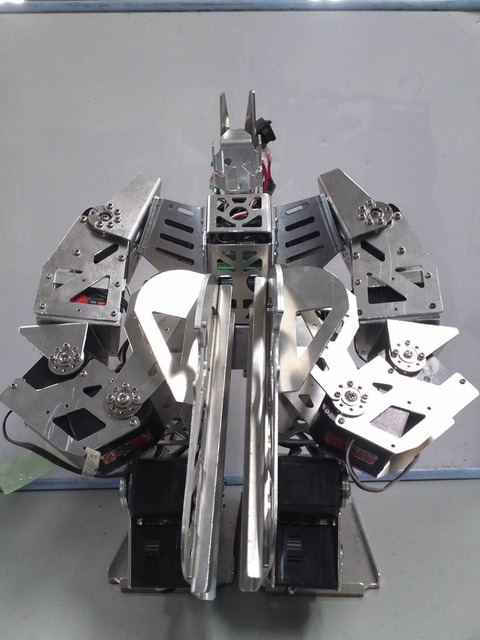
MARDUK
ABOUT 大学3年生の夏休み2週間で作り上げたもの.初めての本格的3 kg級の機体.これでROBO-ONEに参加.命名はこのときやっていた勝手に太陽系シリーズ第2段の木星より, 古代メソポタミアの都市神マルドゥークから名を頂戴 . SPEC 自由度は計21軸・片腕5軸(肩ピッチ1軸,肩ロール1軸,肘ヨー1軸,肘ロール1軸,手首ロール1軸)・片足5軸(股ロール1軸1,腿ピッチ1軸,脛ピッチ1軸,足首ピッチ1軸,足首ロール1軸)・腰ヨー1軸 重量は 3 kg ほど.全長は 54 cm.上半身の特徴は,コントラバスモチーフの腕先. 1.5厚のアルミ5枚重ねの7.5厚.ここだけで 100 g.おかげでかなりの打撃力.しかしその代償は腰にくる. 担当箇所 コンセプトデザイン ROBO-ONEで戦うため攻撃力重視→ 重さ=パワーの脳筋仕様 設計 Autodesk Inventorを利用 加工 アルミの切断,穴あけ,タップ立て ,曲げ 組立 モーター,制御基板等組付け ねじ止め モーションデザイン 前進,後退 左右旋回 スラローム 前後起き上がり 弱パンチ,強パンチ アッパー その他 その年のROBO-ONEに参加.その時私は他のロボット(MAXIMUM JOKER)の操縦を担当していました. リンク 当時のブログ
記事を開く →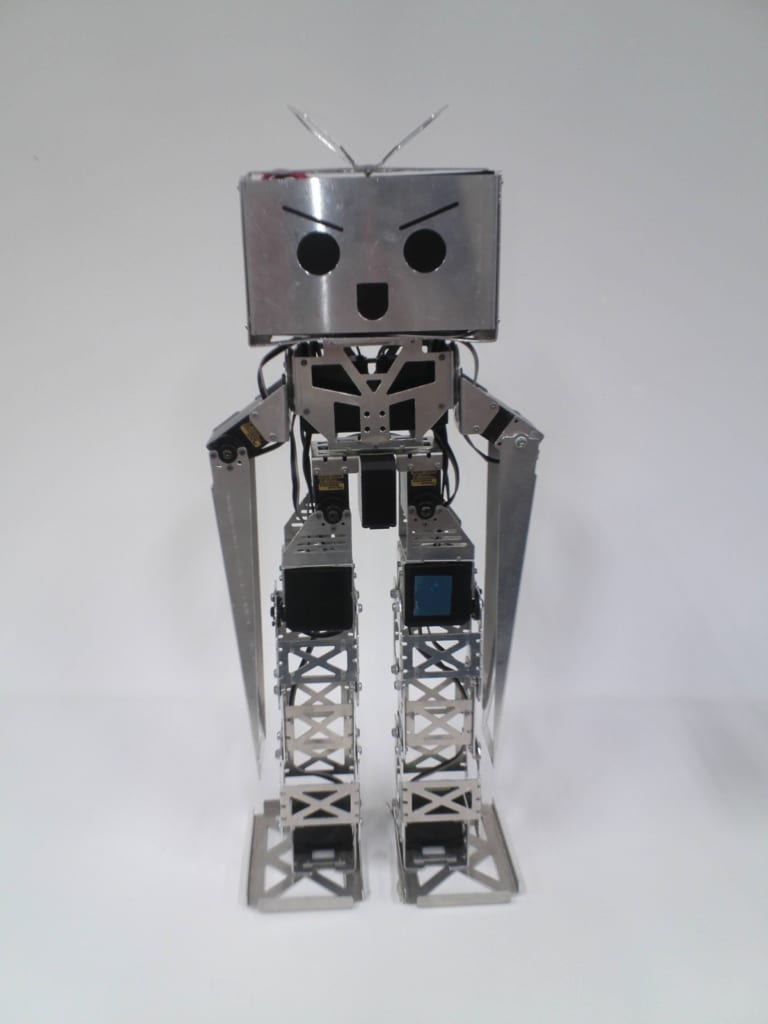
NB3 VER.2
ABOUT NB3の上半身を改良したもの.基板にアクセスしやすくなり,しかも可愛さもアップした.しばらくマスコットとして地域貢献活動などで活躍. SPEC 自由度は計11軸・片腕(肩ヨー1軸,肩ロール1軸)・片足(股ロール1軸,腿ピッチ1軸,足首ピッチ1軸)・腰ヨー1軸重量は990 g ほど.基本はNB3と同等.実は攻撃力はそのままだがその牙を隠し,ダンスで周りを盛り上げる平和主義者となった. 担当箇所 コンセプトデザイン 頭部が大きく開き基板にイージーアクセス あとバッテリーも頭に入れて安全に 設計 Autodesk Inventorを利用 加工 アルミの切断,穴あけ,タップ立て ,曲げ 組立 モーター,制御基板等組付け ねじ止め モーションデザイン 前進,後退 左右旋回 スラローム 起き上がり 突き攻撃 ダンス3種 物を持つ,運ぶ その他 とくに大会には参加せず.サークルの地域貢献活動にひっぱりダコだった.そして5年くらいメンテナンスフリーで動いてくれたすごい奴. リンク 当時のブログ
記事を開く →
奥の手
ABOUT 学部2年のときに製作したロボットハンドグローブ型デバイスと同じポーズをとる。 後輩のリアルテック君が紹介動画をアップしてました。 担当箇所 設計 Autodesk Inventorを利用 加工 アルミの切断,穴あけ,タップ立て ,曲げ その他 第17回ロボットグランプリ大道芸ロボット競技コンピュータ制御部門で技術賞を受賞
記事を開く →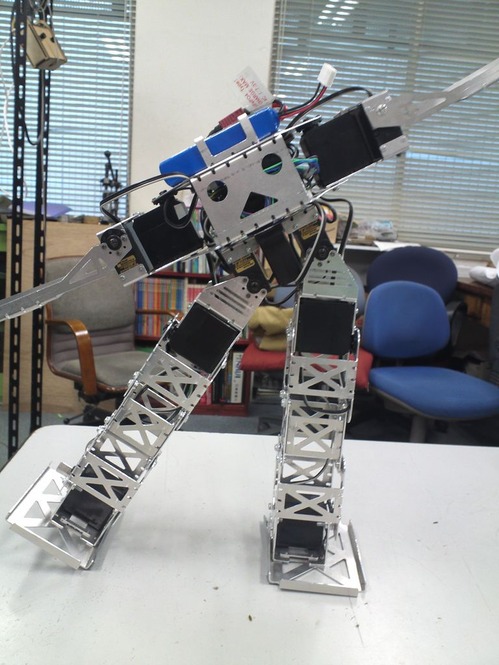
NB3
ABOUT 大学2年生の6~8月にかけて製作したもの. コンセプトは「前後を問わないリバーシブルボディなロボ」. 前後対称のデザインになっていて裏にも顔がある. SPEC 自由度は計11軸・片腕(肩ヨー1軸,肩ロール1軸)・片足(股ロール1軸,腿ピッチ1軸,足首ピッチ1軸)・腰ヨー1軸 重量は960 g ほど.身長 35 cm.重量を減らすため足首を挫けないようにした.脚は平行リンクかつ前後対称のデザインでどちらにも膝を出せる. 前後の概念がなくなった結果,モーションデータ自体は通常の2倍必要になった.操作には PS2 のコントローラーを使用.満タンの 2 L ペットボトルなら倒すことができる. 担当箇所 コンセプトデザイン ROBO-ONE参加にあたり,敵に回り込まれない立ち回りが必要→ じゃあリバーシブルで対応しよう! 設計 Autodesk Inventorを利用 加工 アルミの切断,穴あけ,タップ立て ,曲げ 組立 モーター,制御基板等組付け ねじ止め モーションデザイン 前進,後退 左右旋回 スラローム 起き上がり 突き攻撃 その他 2013年夏のROBO-ONE Lightに参加して、ベスト16でした. リンク…
記事を開く →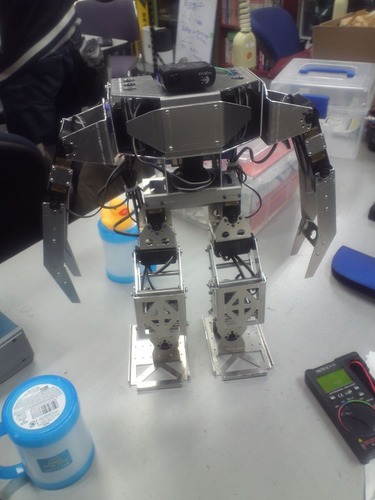
POLYPEMOS
ABOUT 大学1年生のときの10~1月にかけて製作したもの.初のちゃんと2足歩行ロボットと胸を張って言えるもの.命名は見た目ががカブトガニに見えたためカブトガニ関係の何かから. SPEC 自由度は計15軸・片腕(肩ピッチ1軸,肩ロール1軸,肘ロール1軸)・片足(股ロール1軸,腿ピッチ1軸,足首ピッチ1軸,足首ロール1軸)・腰ヨー1軸 重量は1.470 kgほど.身長38 cm.脚には平行リンクを採用し軸数を削減,モーション作成の手間も削減.コントロールはPS2のコントローラーを使用.コントローラーの電文はマイコンで処理.軽いものなら持って移動できる. 担当箇所 胴体・脚部設計 Autodesk Inventorを利用 加工 アルミの切断,穴あけ,タップ立て ,曲げ 組立 モーター,制御基板等組付け ねじ止め モーションデザイン 前進,後退 左右旋回 スラローム 前後起き上がり 物を持つ,運ぶ その他 部内戦で1年生ながら優勝あと2012年度末のチキチキロボマッチミニに参加したはず・・・ リンク 当時のブログ
記事を開く →
Boom Boom
ABOUT 大学一年生の6~8月に製作した2足歩行ロボット第1号.自由度は体重移動,右足,左足の3軸命名は体を左右にブンブン振って歩くことから. 担当箇所 加工 アルミの切断,穴あけ,タップ立て プラバンの切断 組立 モーター,制御基板等組付け ねじ止め 装飾 プラバンの装着 モーションデザイン 前進,後退 左右旋回 前後起き上がり ボールキック 相撲 その他 サークル内新人戦で優勝しました。内容は徒競走,スラローム走,相撲,そして後日カーリング(?) 勝因は装飾による重量増加。 リンク 当時のブログ
記事を開く →