POLYPEMOS
ABOUT
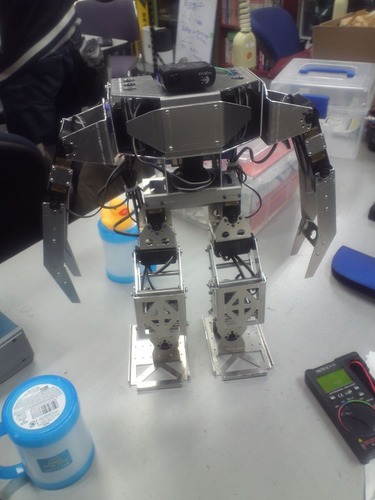
大学1年生のときの10~1月にかけて製作したもの.
初のちゃんと2足歩行ロボットと胸を張って言えるもの.
命名は見た目ががカブトガニに見えたためカブトガニ関係の何かから.
SPEC
自由度は計15軸
・片腕(肩ピッチ1軸,肩ロール1軸,肘ロール1軸)
・片足(股ロール1軸,腿ピッチ1軸,足首ピッチ1軸,足首ロール1軸)
・腰ヨー1軸
重量は1.470 kgほど.
身長38 cm.
脚には平行リンクを採用し軸数を削減,モーション作成の手間も削減.
コントロールはPS2のコントローラーを使用.コントローラーの電文はマイコンで処理.
軽いものなら持って移動できる.
担当箇所
- 胴体・脚部設計
- Autodesk Inventorを利用
- 加工
- アルミの切断,穴あけ,タップ立て ,曲げ
- 組立
- モーター,制御基板等組付け
- ねじ止め
- モーションデザイン
- 前進,後退
- 左右旋回
- スラローム
- 前後起き上がり
- 物を持つ,運ぶ
その他
部内戦で1年生ながら優勝
あと2012年度末のチキチキロボマッチミニに参加したはず・・・