NB3
ABOUT
大学2年生の6~8月にかけて製作したもの.
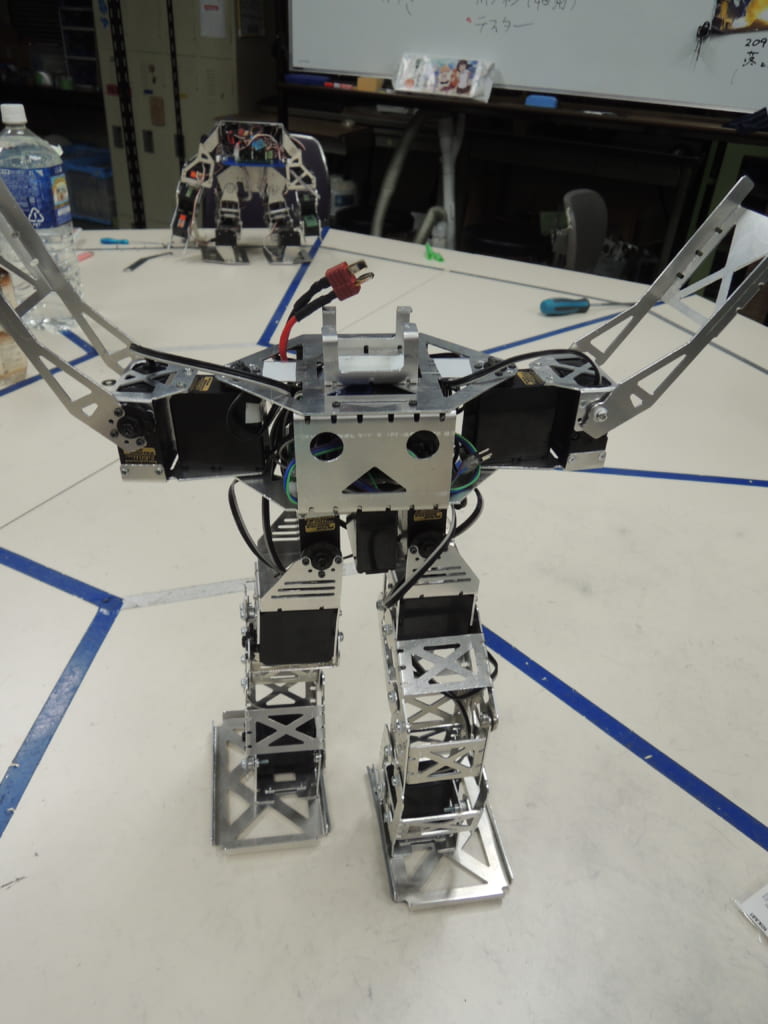
コンセプトは「前後を問わないリバーシブルボディなロボ」.
前後対称のデザインになっていて裏にも顔がある.
SPEC
自由度は計11軸
・片腕(肩ヨー1軸,肩ロール1軸)
・片足(股ロール1軸,腿ピッチ1軸,足首ピッチ1軸)
・腰ヨー1軸
重量は960 g ほど.
身長 35 cm.
重量を減らすため足首を挫けないようにした.
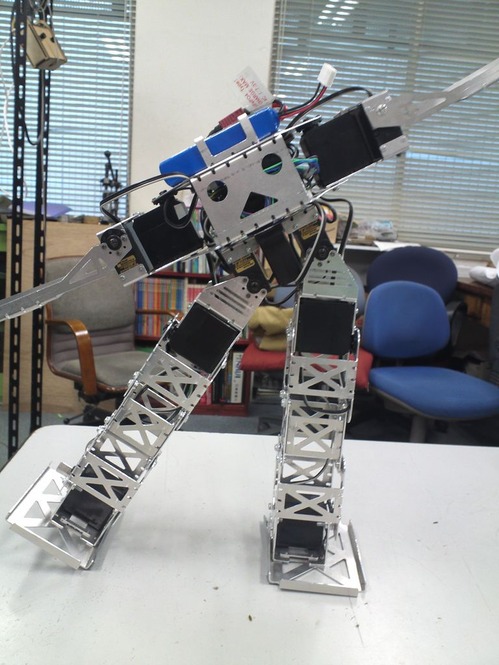
脚は平行リンクかつ前後対称のデザインでどちらにも膝を出せる.

前後の概念がなくなった結果,モーションデータ自体は通常の2倍必要になった.
操作には PS2 のコントローラーを使用.
満タンの 2 L ペットボトルなら倒すことができる.
担当箇所
- コンセプトデザイン
- ROBO-ONE参加にあたり,敵に回り込まれない立ち回りが必要
→ じゃあリバーシブルで対応しよう!
- ROBO-ONE参加にあたり,敵に回り込まれない立ち回りが必要
- 設計
- Autodesk Inventorを利用
- 加工
- アルミの切断,穴あけ,タップ立て ,曲げ
- 組立
- モーター,制御基板等組付け
- ねじ止め
- モーションデザイン
- 前進,後退
- 左右旋回
- スラローム
- 起き上がり
- 突き攻撃
その他
2013年夏のROBO-ONE Lightに参加して、ベスト16でした.