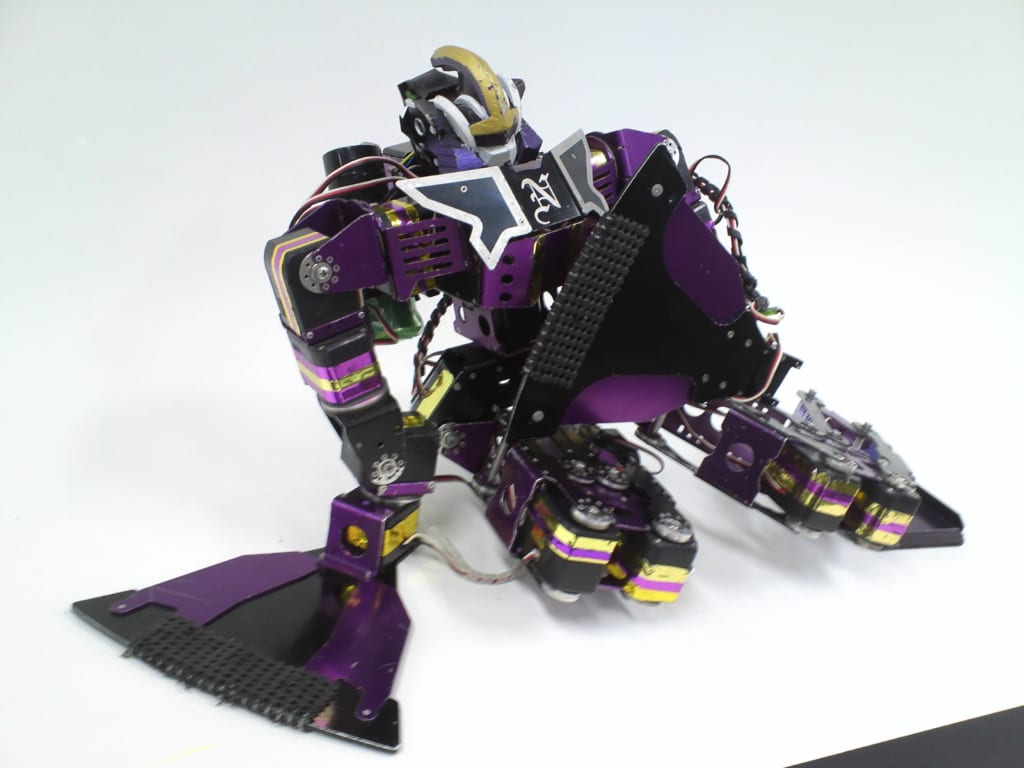
MARDUK
ABOUT
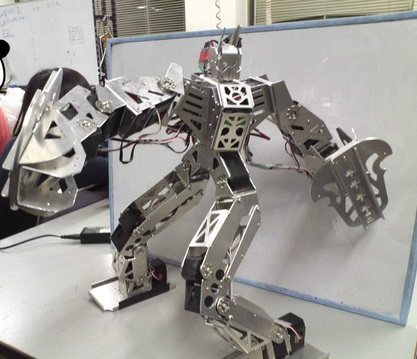
大学3年生の夏休み2週間で作り上げたもの.
初めての本格的3 kg級の機体.
これでROBO-ONEに参加.
命名はこのときやっていた勝手に太陽系シリーズ第2段の木星より, 古代メソポタミアの都市神マルドゥークから名を頂戴 .
SPEC
自由度は計21軸
・片腕5軸(肩ピッチ1軸,肩ロール1軸,肘ヨー1軸,肘ロール1軸,手首ロール1軸)
・片足5軸(股ロール1軸1,腿ピッチ1軸,脛ピッチ1軸,足首ピッチ1軸,足首ロール1軸)
・腰ヨー1軸
重量は 3 kg ほど.
全長は 54 cm.
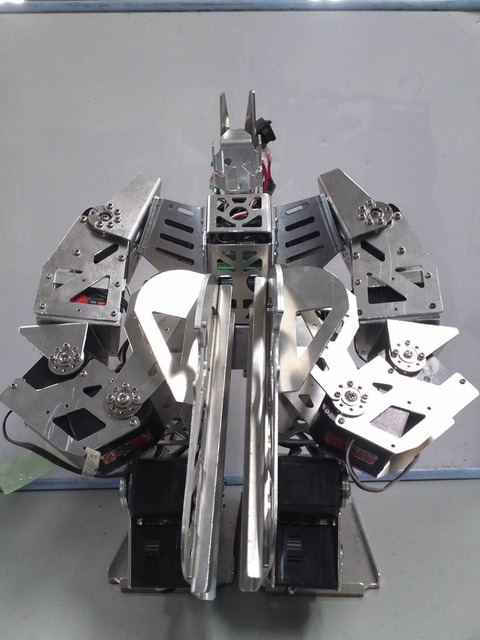
上半身の特徴は,コントラバスモチーフの腕先.
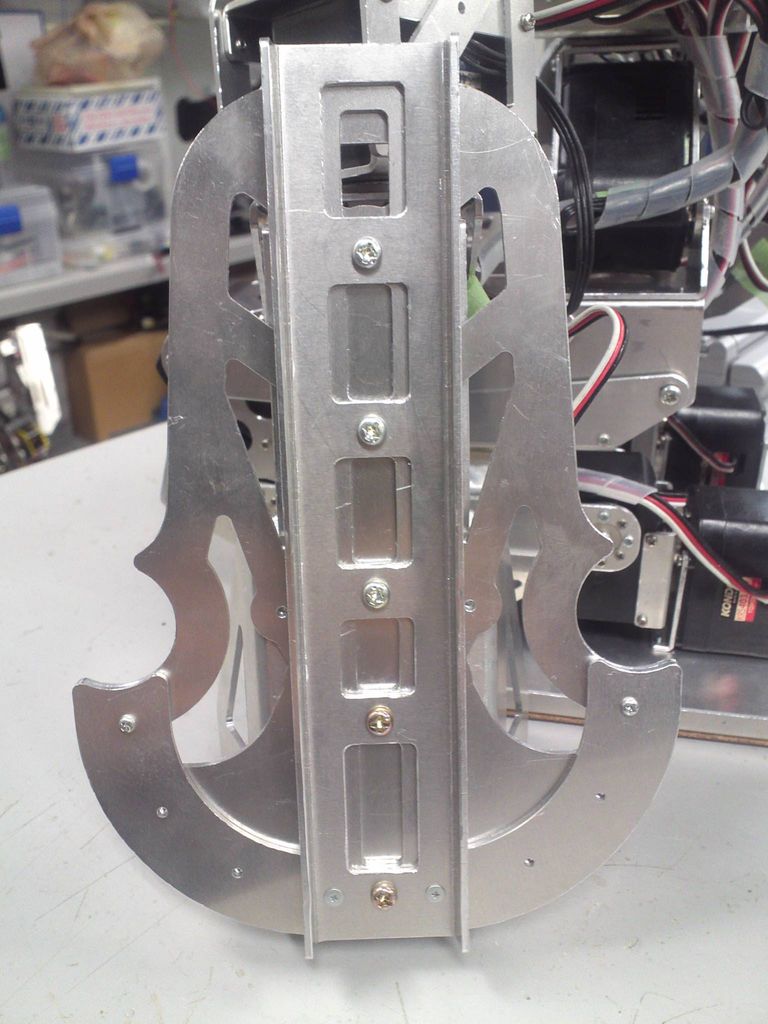
1.5厚のアルミ5枚重ねの7.5厚.
ここだけで 100 g.
おかげでかなりの打撃力.しかしその代償は腰にくる.
担当箇所
- コンセプトデザイン
- ROBO-ONEで戦うため攻撃力重視
→ 重さ=パワーの脳筋仕様
- ROBO-ONEで戦うため攻撃力重視
- 設計
- Autodesk Inventorを利用
- 加工
- アルミの切断,穴あけ,タップ立て ,曲げ
- 組立
- モーター,制御基板等組付け
- ねじ止め
- モーションデザイン
- 前進,後退
- 左右旋回
- スラローム
- 前後起き上がり
- 弱パンチ,強パンチ
- アッパー
その他
その年のROBO-ONEに参加.
その時私は他のロボット(MAXIMUM JOKER)の操縦を担当していました.