
ABOUT
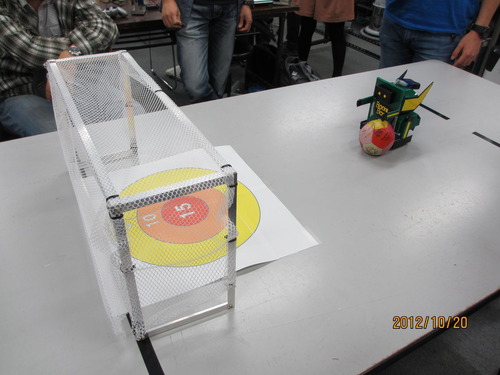
大学一年生の6~8月に製作した2足歩行ロボット第1号.
自由度は体重移動,右足,左足の3軸
命名は体を左右にブンブン振って歩くことから.
担当箇所
- 加工
- アルミの切断,穴あけ,タップ立て
- プラバンの切断
- 組立
- モーター,制御基板等組付け
- ねじ止め
- 装飾
- プラバンの装着
- モーションデザイン
- 前進,後退
- 左右旋回
- 前後起き上がり
- ボールキック
- 相撲
その他
サークル内新人戦で優勝しました。
内容は徒競走,スラローム走,相撲,そして後日カーリング(?)
勝因は装飾による重量増加。
coming soon...
2012年8月10日
大学一年生の6~8月に製作した2足歩行ロボット第1号.
自由度は体重移動,右足,左足の3軸
命名は体を左右にブンブン振って歩くことから.
サークル内新人戦で優勝しました。
内容は徒競走,スラローム走,相撲,そして後日カーリング(?)
勝因は装飾による重量増加。
© 2025 4JO's LAB
Theme by Anders Norén